
华夏相机主从文案说明
主从模式
一、相机地址:
1、软件只绑定主相机IP。从相机IP禁止与软件绑定
2、从相机只需要通网通电,无需接其他设备
3、、从相机IP写入主相机参数内:更多操作>外设参数>主从模式
如图:

1、数据上报模式:
数据过滤上报:延时等待时长内,输出主从相机中抓拍结果
置信度高的一个(只上报1个识别结果);否则依次输出先到的抓拍结果
双相机数据同时上报:同时输出主从相机的识别结果(软件收到2个识别结果)
1、延时等待时长:
作为主从相机进行抓拍结果置信度比较的等待时间,若主从相机
的抓拍结果不在同一个等待时间周期,则认为是 2 个周期的抓拍结果(即:2台相机超出了等待时长);此时即使设置了“数据过滤上报”模式,也会分别依次输出主从相机的抓拍结果给软件
厂家建议时间设置1500(1.5秒);但客户体验就是识别后,车主要多等1.5秒的时间,才会开闸。
主从模式常见问题解决:
问题1:由于现场角度问题,主从相机都会同时识别
优化方案:利用算法参数>高级参数>最大和最小车牌宽度来过滤不想要的识别结果
如图:厂家默认最小车牌宽度是60;最大是250。故,在此范围内的识别结果会输出,否则相机直接过滤。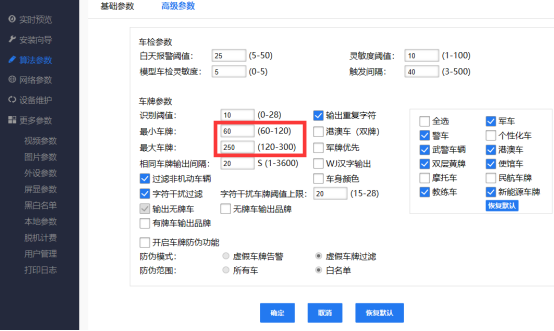
例:转弯车辆识别时,从相机车牌宽度71;此时主相机识别车牌宽度120正常,即:从相机把最小车牌宽度设置到90,可以过滤掉很多无用的数据。
1、投稿可获得本站高级账号。
2、本资源部分来源行业内从业者提供或互联网收集,如有侵权请联系及时处理。
3、有偿提供各种程序,设备的技术支持,解决方案,可远程操作。
车牌识别教程资源网站 » 华夏相机主从文案说明
2、本资源部分来源行业内从业者提供或互联网收集,如有侵权请联系及时处理。
3、有偿提供各种程序,设备的技术支持,解决方案,可远程操作。
车牌识别教程资源网站 » 华夏相机主从文案说明

发表评论